Servo motores tem três fios: o poder, terra e sinal. O cabo de alimentação é normalmente vermelho, e deve ser conectado ao pino de 5V na placa Arduino. O fio terra é normalmente preto ou marrom e deve ser conectado a um pino de aterramento na placa Arduino. O pino de sinal é tipicamente amarelo ou laranja e deve ser conectado ao pino 9 na placa Arduino.
O potenciômetro deve ser ligado para que os dois pinos externos estão ligados ao poder (+5 V) e terra, e seu pino do meio é ligado à entrada analógica 0 no Arduino.
clique nas imagens para ampliar
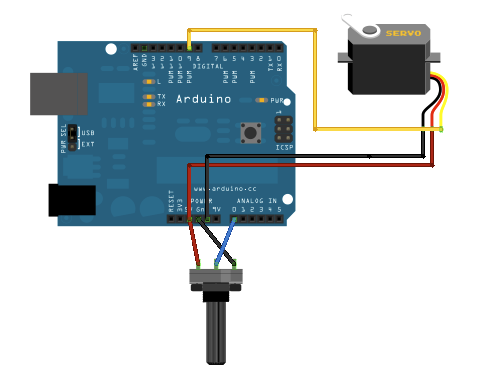
imagens desenvolvido utilizando Fritzing . Para mais exemplos de circuito, consulte a página do projeto Fritzing
Código
// Controlando uma posição servo através de um potenciômetro (resistor variável)
// por Michal Rinott <http://people.interaction-ivrea.it/m.rinott>
// por Michal Rinott <http://people.interaction-ivrea.it/m.rinott>
#include <Servo.h>
Servo myservo; // Cria objeto servo para controlar um servo
int potpin = 0; // analógico usado para conectar o potenciômetro
int val; // variável para ler o valor do pino analógico
void setup()
{
myservo.attach(9); // atribui o servo de pino 9 para o objeto servo
}
void loop()
{
val = analogRead(potpin); // lê o valor do potenciômetro (valor entre 0 e 1023)
val = map(val, 0, 1023, 0, 179); // escalá-lo para usá-lo com o servo (valor entre 0 e 180)
myservo.write(val); // define a posição de servo de acordo com o valor
delay(15); // aguarda o servo para chegar lá
}
Servo myservo; // Cria objeto servo para controlar um servo
int potpin = 0; // analógico usado para conectar o potenciômetro
int val; // variável para ler o valor do pino analógico
void setup()
{
myservo.attach(9); // atribui o servo de pino 9 para o objeto servo
}
void loop()
{
val = analogRead(potpin); // lê o valor do potenciômetro (valor entre 0 e 1023)
val = map(val, 0, 1023, 0, 179); // escalá-lo para usá-lo com o servo (valor entre 0 e 180)
myservo.write(val); // define a posição de servo de acordo com o valor
delay(15); // aguarda o servo para chegar lá
}
Fonte: Arduino.cc
Nenhum comentário:
Postar um comentário
Observação: somente um membro deste blog pode postar um comentário.